Embodied AI in Unknown and Open Worlds
I am a PhD student at the ELLIS Robot Learning Lab at the University of Freiburg and 2025 RSS Pioneer. My research interests are focused on reinforcement learning, embodied AI and robotics. In my work, I enable mobile manipulation in unknown and unstructured environments. Much more broadly I am interested in all topics surrounding motion generation, autonomy and machine learning in unknown and open worlds.
In the past I have worked across all aspects of autonomous agents and their environments. After studying economics and working in econometric forecasting at the Swiss Central Bank, I graduated from the MSc Computational Statistics and Machine Learning at University College London. I then designed novel decentralised environments and consensus protocols before I flipped the coin and started to optimize agents’ behaviours within an environment during my PhD.
Publications
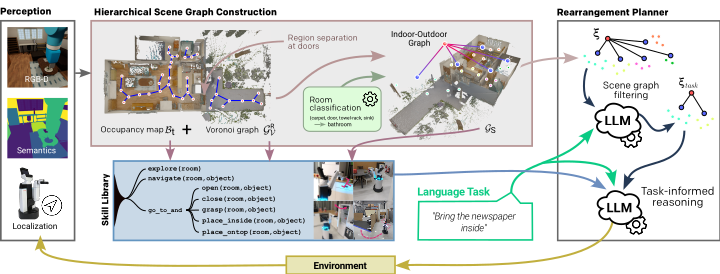 MORE: Mobile Manipulation Rearrangement Through Grounded Language Reasoning, Mohammad Mohammadi*, Daniel Honerkamp*, Martin Büchner*, Matteo Cassinelli*, Tim Welschehold, Fabien Despinoy, Igor Gilitschenski, Abhinav Valada, arXiv preprint arXiv:2505.03035, 2025.
MORE: Mobile Manipulation Rearrangement Through Grounded Language Reasoning, Mohammad Mohammadi*, Daniel Honerkamp*, Martin Büchner*, Matteo Cassinelli*, Tim Welschehold, Fabien Despinoy, Igor Gilitschenski, Abhinav Valada, arXiv preprint arXiv:2505.03035, 2025.
 Task-Driven Co-Design of Mobile Manipulators, Raphael Schneider*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2025.
Task-Driven Co-Design of Mobile Manipulators, Raphael Schneider*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2025.
 Whole‑Body Teleoperation for Mobile Manipulation at Zero Added Cost, Daniel Honerkamp*, Harsh Mahesheka*, Jan Ole Hartz, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2025.
Whole‑Body Teleoperation for Mobile Manipulation at Zero Added Cost, Daniel Honerkamp*, Harsh Mahesheka*, Jan Ole Hartz, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2025.
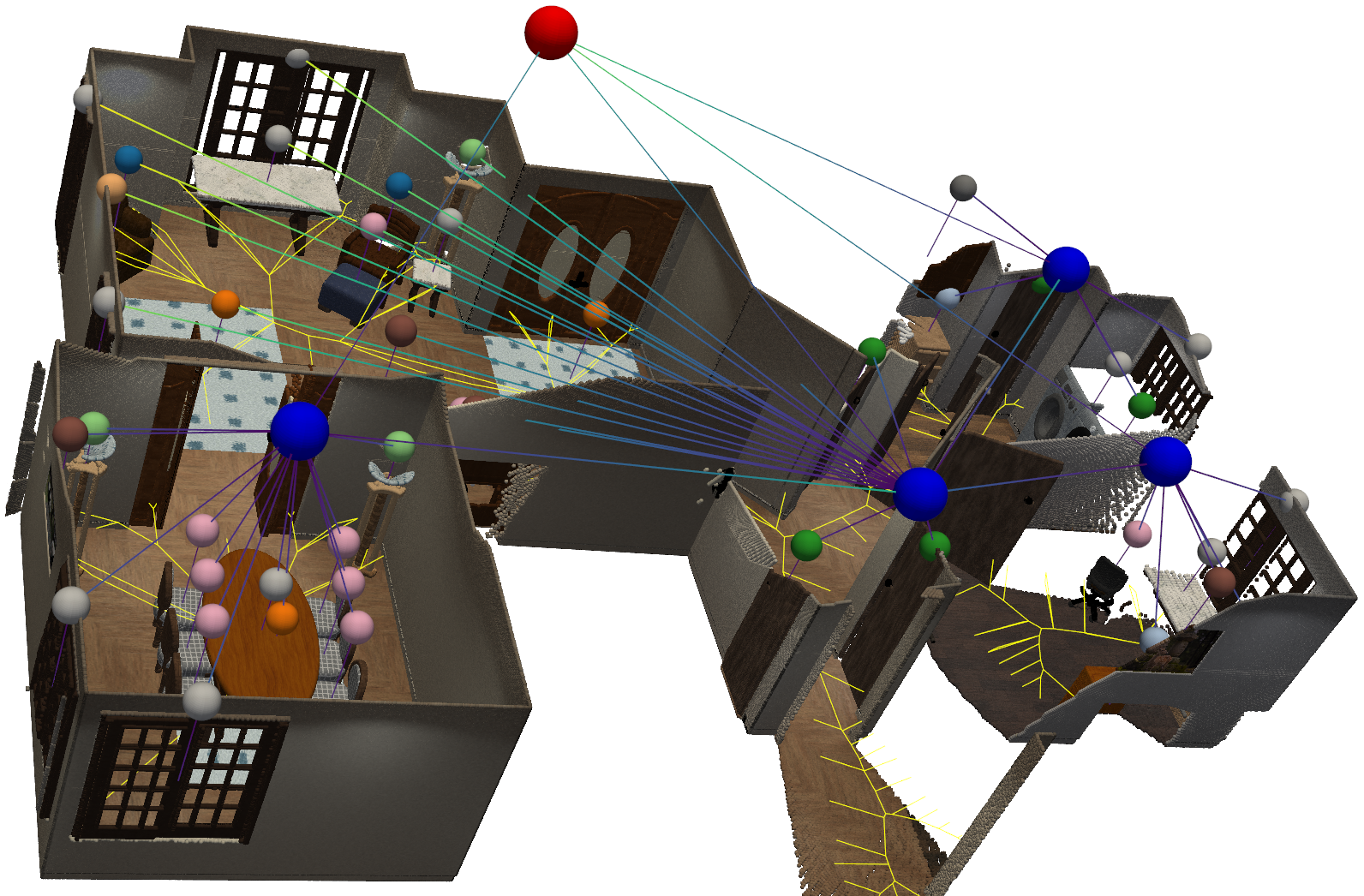 Language‑Grounded Dynamic Scene Graphs for Interactive Object Search with Mobile Manipulation, Daniel Honerkamp*, Martin Büchner*, Fabien Despinoy, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2024.
Language‑Grounded Dynamic Scene Graphs for Interactive Object Search with Mobile Manipulation, Daniel Honerkamp*, Martin Büchner*, Fabien Despinoy, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2024.
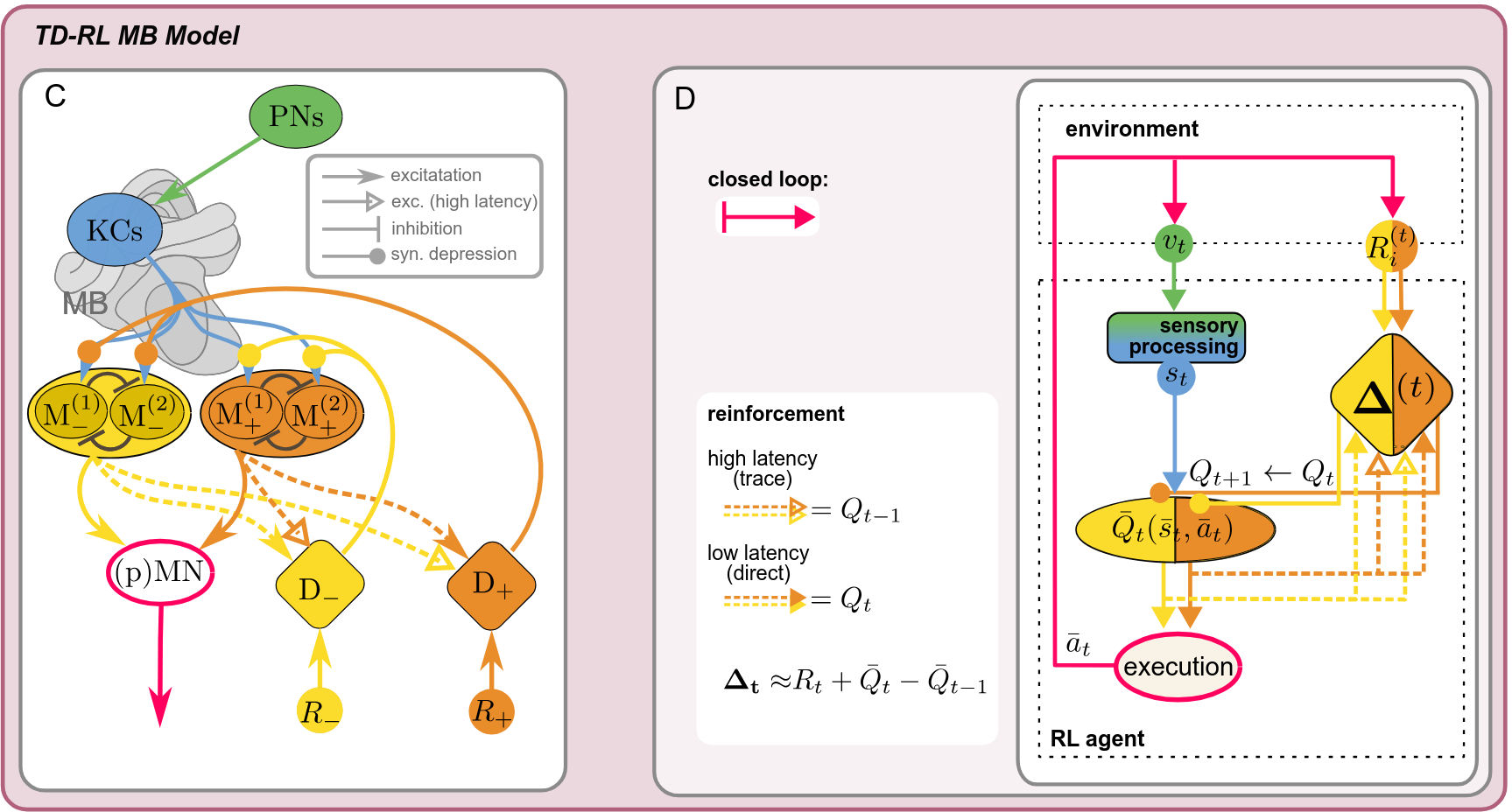 Recent Trends in Insect and Robot Navigation through the Lens of Reinforcement Learning, Stephan Lochner, Daniel Honerkamp, Abhinav Valada, Andrew D Straw, Frontiers in Computational Neuroscience, 2024.
Recent Trends in Insect and Robot Navigation through the Lens of Reinforcement Learning, Stephan Lochner, Daniel Honerkamp, Abhinav Valada, Andrew D Straw, Frontiers in Computational Neuroscience, 2024.
 Perception Matters: Enhancing Embodied AI with Uncertainty‑Aware Semantic Segmentation, Sai Prasanna*, Daniel Honerkamp*, Kshitij Sirohi*, Tim Welschehold, Wolfram Burgard, Abhinav Valada, Robotics Research, 2024.
Perception Matters: Enhancing Embodied AI with Uncertainty‑Aware Semantic Segmentation, Sai Prasanna*, Daniel Honerkamp*, Kshitij Sirohi*, Tim Welschehold, Wolfram Burgard, Abhinav Valada, Robotics Research, 2024.
 N2M2: Learning Navigation for Arbitrary Mobile Manipulation Motions in Unseen and Dynamic Environments, Daniel Honerkamp, Tim Welschehold, Abhinav Valada, IEEE Transactions on Robotics (T‑RO), 2023.
N2M2: Learning Navigation for Arbitrary Mobile Manipulation Motions in Unseen and Dynamic Environments, Daniel Honerkamp, Tim Welschehold, Abhinav Valada, IEEE Transactions on Robotics (T‑RO), 2023.
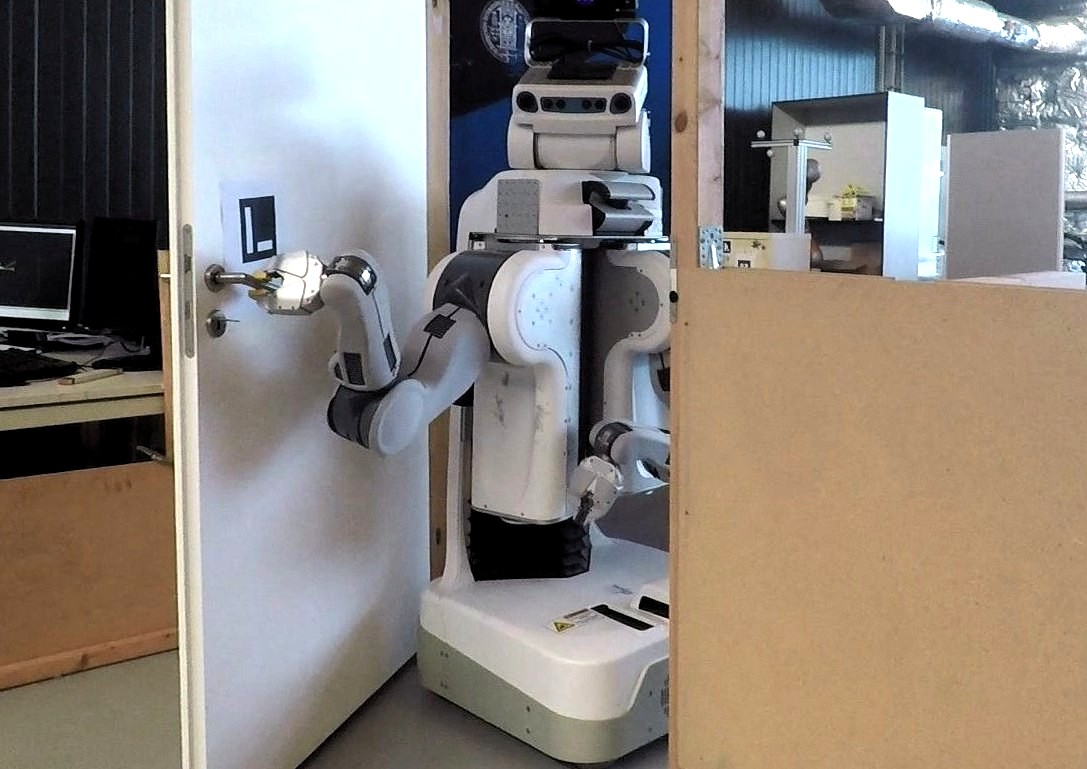
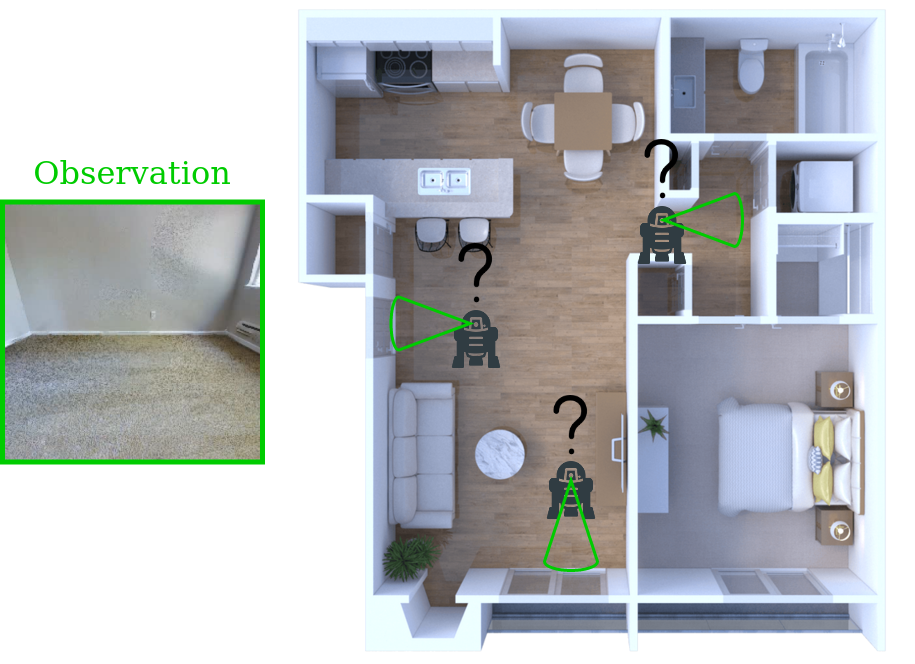
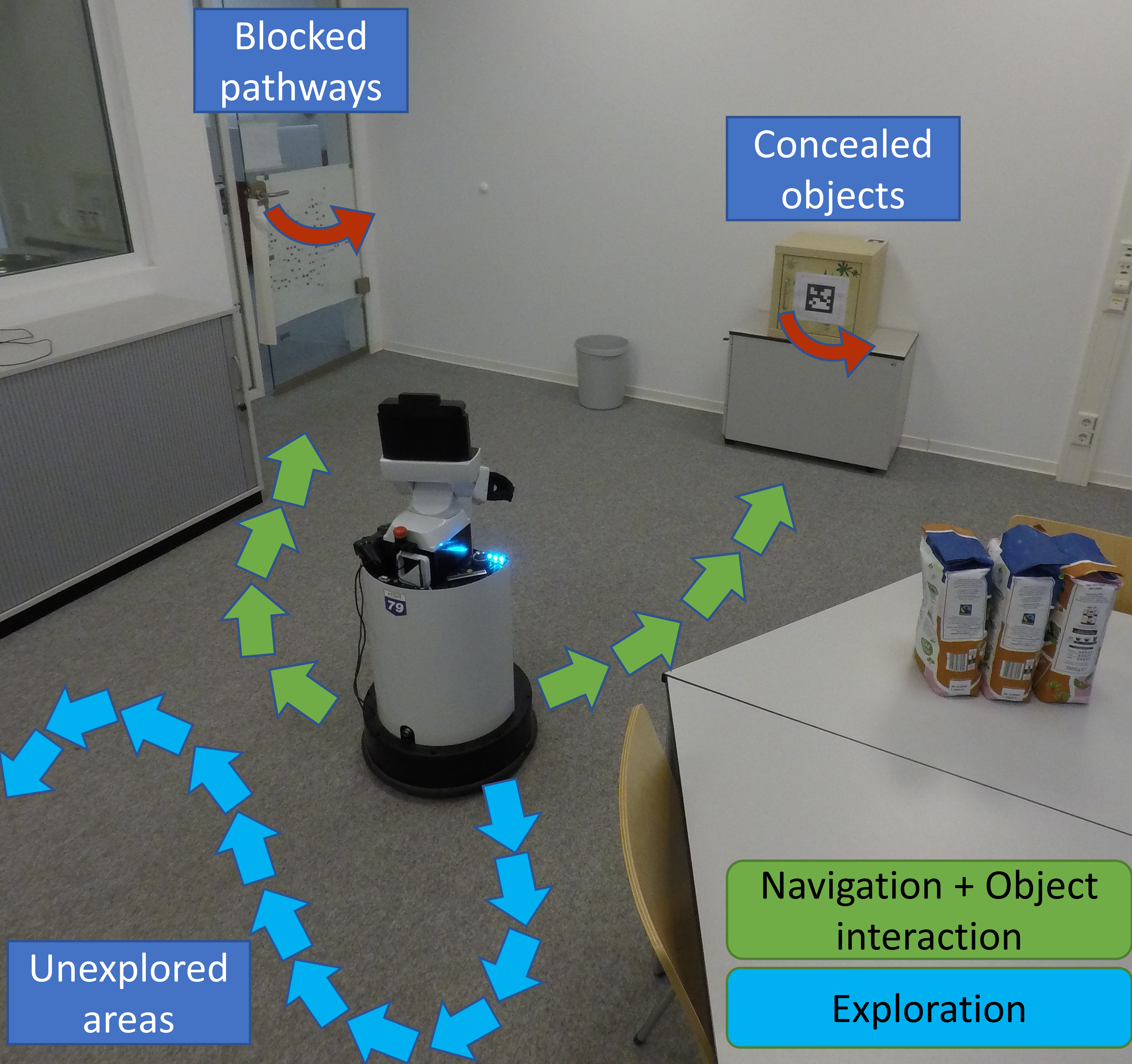 Learning Hierarchical Interactive Multi‑Object Search for Mobile Manipulation, Fabian Schmalstieg*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2023.
Learning Hierarchical Interactive Multi‑Object Search for Mobile Manipulation, Fabian Schmalstieg*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2023.
 Catch Me if You Hear Me: Audio‑Visual Navigation in Complex Unmapped Environments With Moving Sounds, Abdelrahman Younes*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2023.
Catch Me if You Hear Me: Audio‑Visual Navigation in Complex Unmapped Environments With Moving Sounds, Abdelrahman Younes*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2023.
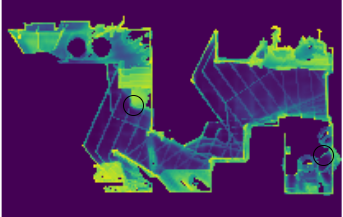
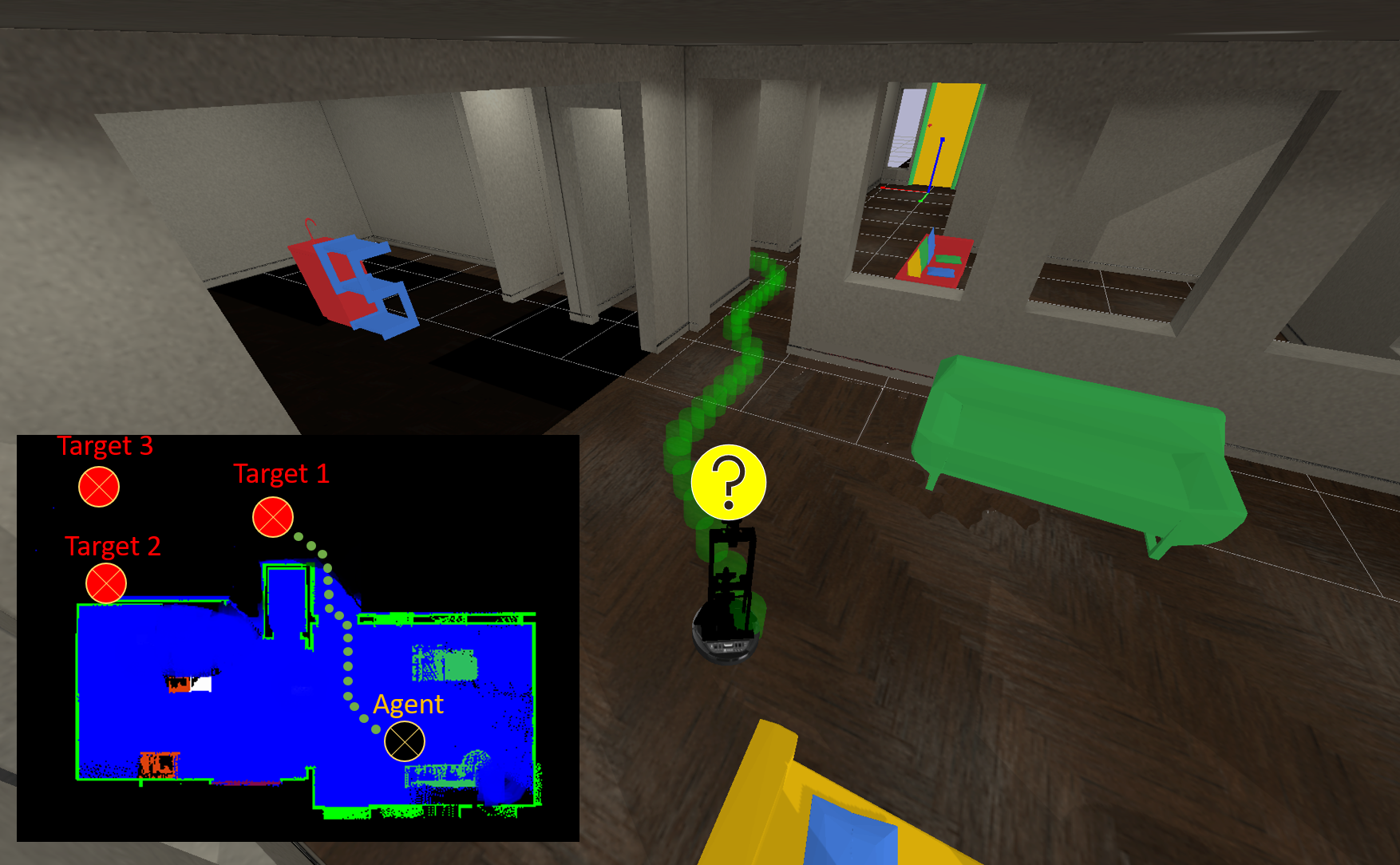 Learning Long‑Horizon Robot Exploration Strategies for Multi‑Object Search in Continuous Action Spaces, Fabian Schmalstieg*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, Robotics Research, 2022.
Learning Long‑Horizon Robot Exploration Strategies for Multi‑Object Search in Continuous Action Spaces, Fabian Schmalstieg*, Daniel Honerkamp*, Tim Welschehold, Abhinav Valada, Robotics Research, 2022.
 Active Particle Filter Networks: Efficient Active Localization in Continuous Action Spaces and Large Maps, Daniel Honerkamp, Suresh Guttikonda, Abhinav Valada, IROS Workshop on Probabilistic Robotics in the Age of Deep Learning, 2022.
Active Particle Filter Networks: Efficient Active Localization in Continuous Action Spaces and Large Maps, Daniel Honerkamp, Suresh Guttikonda, Abhinav Valada, IROS Workshop on Probabilistic Robotics in the Age of Deep Learning, 2022.
 Learning Kinematic Feasibility for Mobile Manipulation through Deep Reinforcement Learning, Daniel Honerkamp, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2021.
Learning Kinematic Feasibility for Mobile Manipulation through Deep Reinforcement Learning, Daniel Honerkamp, Tim Welschehold, Abhinav Valada, IEEE Robotics and Automation Letters (RA‑L), 2021.
Democratising blockchain: A minimal agency consensus model, Marcin Abram, Daniel Honerkamp, Jon Ward, Jin‑Mann Wong, Proceedings of Tokenomics International Conference on Blockchain Economics, Security and Protocols, 2019.
Awards
- Robotics: Science and Systems (RSS) Pioneer, for world’s top early career researchers in robotics, 2025.
- Best Paper Finalist, ICRA 3rd Workshop on Human-Centric Multilateral Teleoperation, 2025.
- 3rd place Futureprice (”Zukunftspreis”), Ewald Marquardt Foundation, 5,000 EUR. For progress and innovation in the generation and coordination of mobile manipulation motions, 2023.
- Best Paper Award, IROS Workshop on Mobile Manipulation and Embodied Intelligence, 2022.
- SoundSpaces Challenge - 2nd Place. Conference on Computer Vision and Pattern Recognition (CVPR) Embodied AI Workshop, 2022.
- SoundSpaces Challenge - 1st Place. Conference on Computer Vision and Pattern Recognition (CVPR) Embodied AI Workshop, 2021.
- Dean’s List Award, University College London (UCL), 2018.